Navigation Module v1
FNAV
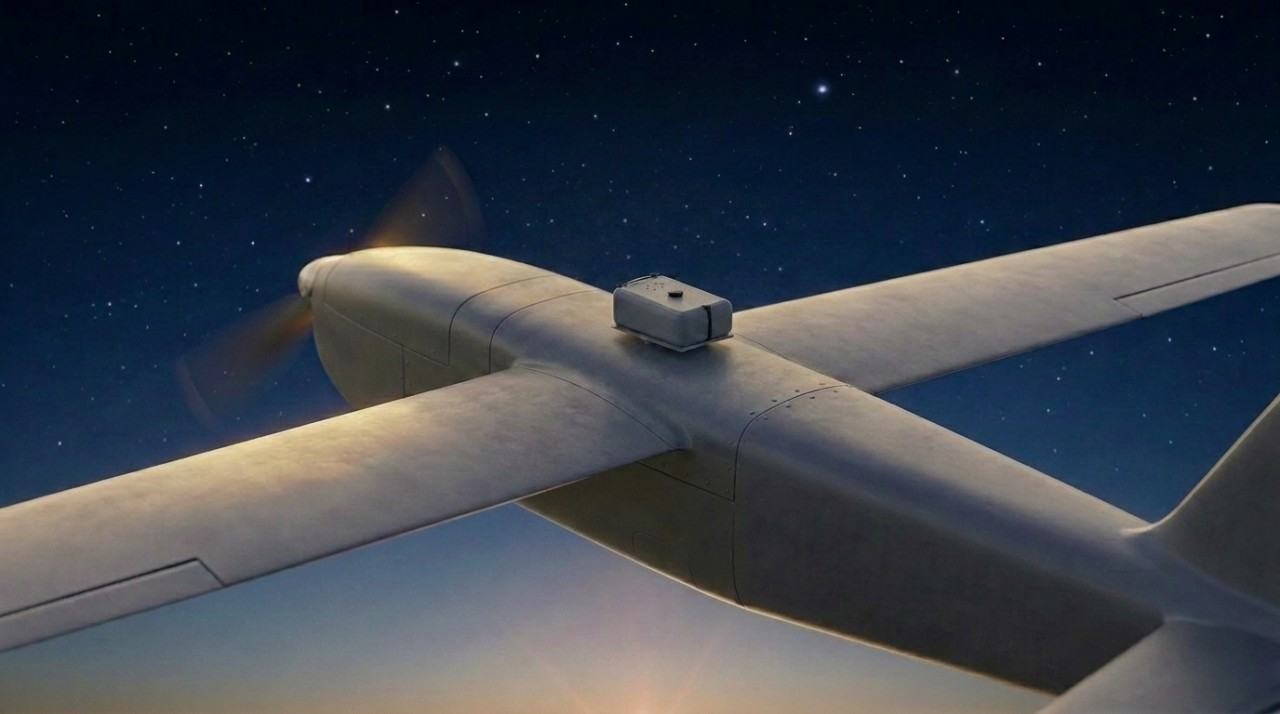
Nav Module
Passive GPS-denied navigation payload.
Zero RF emissions. Day and night.
UAV, USV, and UGV platforms.
Pricing on request
→ Get in touch
100g
Weight
0.8°
Yaw accuracy
<30min
Time to install
18cm
Length
13cm
Width
10cm
Height